项目背景
无人机自主降落是无人机迈向全自主化的核心技术之一。针对无人机在复杂环境下精准降落的工程难题,本项目提出融合传统图像处理与深度学习的混合视觉引导方案,获南京航空航天大学校级创新创业项目立项并获经费支持。
项目最终获评南京航空航天大学"校级优秀创新创业项目"。
核心技术贡献
- 负责核心视觉识别算法开发,融合传统图像处理与 YOLO26n-RepVIT 深度学习模型
- 完成数据采集、标注、模型训练与调优,复杂场景下将引导标识检测准确率提升至 85%
- 利用 OpenCV 计算空间坐标,实现无人机与降落平台的相对位姿解算
- 设计多级识别引导标识,支持远距离(>10m)、中距离(2~10m)、近距离(<2m)三级检测切换
- 基于 Python + PyTorch 搭建完整算法 pipeline,实现实时检测与位姿输出
- 使用奥比中光(Orbbec)深度相机进行深度信息采集,辅助三维定位
技术栈
系统演示 - 检测效果
以下为算法在不同距离下对引导标识的识别效果:
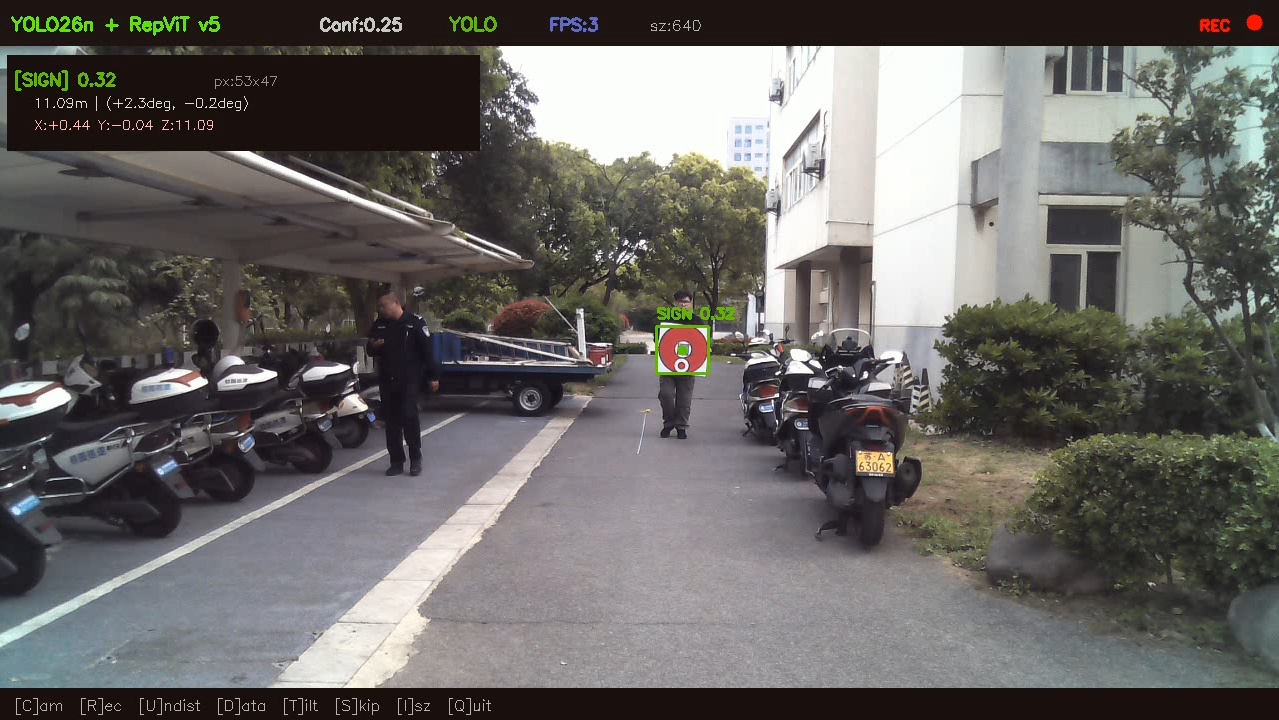
远距离识别(>10m)

中距离识别(2~10m)
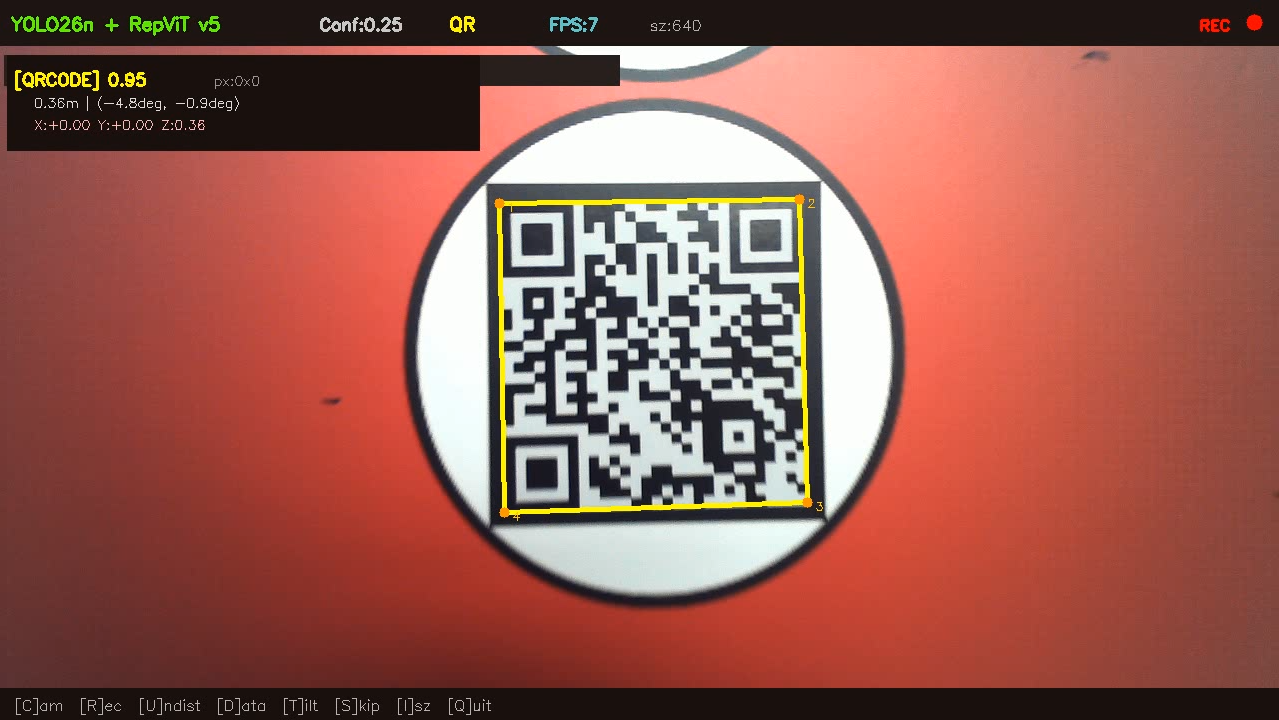
近距离识别(<2m)
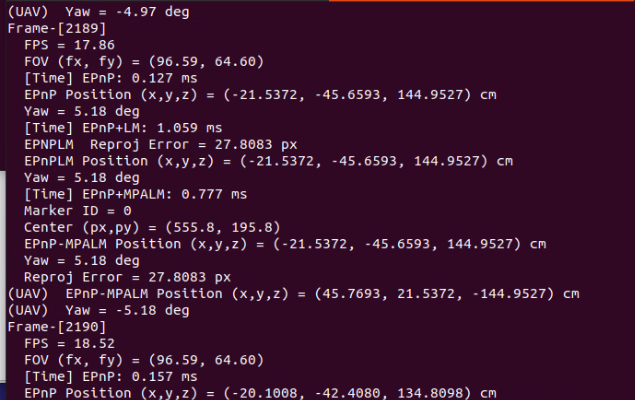
位姿解算输出(6D姿态)
引导标识设计
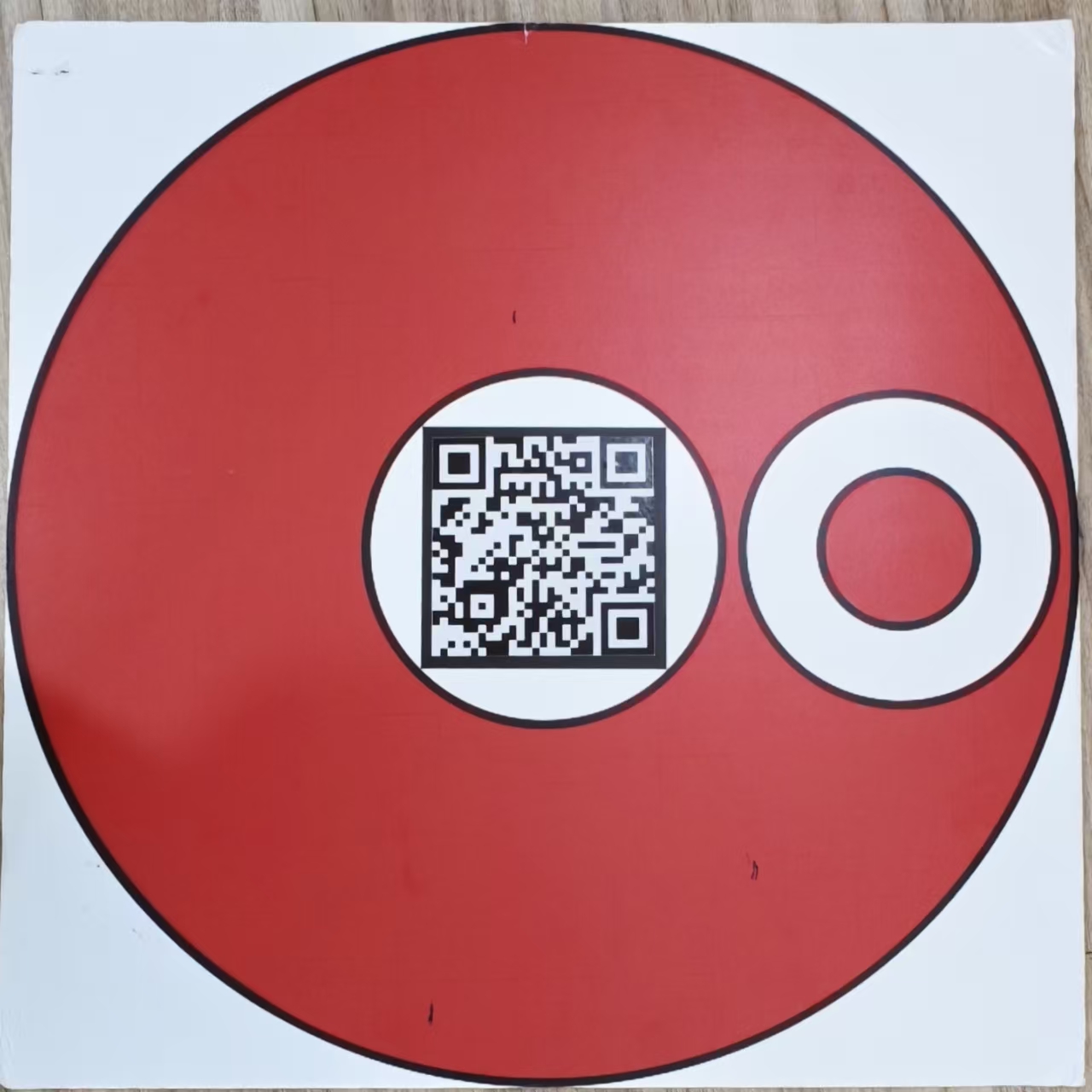
多级引导标识实物设计
奥比中光深度相机系统
检测效果视频
以下为无人机视觉引导系统的实际检测演示视频:
视频:无人机视觉引导系统实时检测演示
项目成果
- 项目获评南京航空航天大学"校级优秀创新创业项目"
- 在复杂背景下,引导标识检测准确率稳定在 85% 以上
- 实现完整的检测-定位-位姿解算算法链路,支持实时输出
- 形成了一套可复用的无人机视觉引导标识设计规范